DQN记录。
Q-learning
首先要学习DQN算法要先学习Q-learning算法,DQN是在Q-learning得基础上结合了深度的方式。
Q-learning算法的核心是维护一张表叫做Q表,该表中保存了面对所有状态采取不同决策的效用值,假设有m种状态,n种操作,那么该表就是m*n的,假设能学习到一张完美的表,那么每帧都选用当前状态可采取操作的效用值最大的操作,那么在游戏中的存活时间就可以无限大。
所以关键是如何学习到这张表:
参考:https://www.zhihu.com/question/26408259的首赞答案。
伪代码如下:
1 | 初始化 Q = {}; //Q表 |
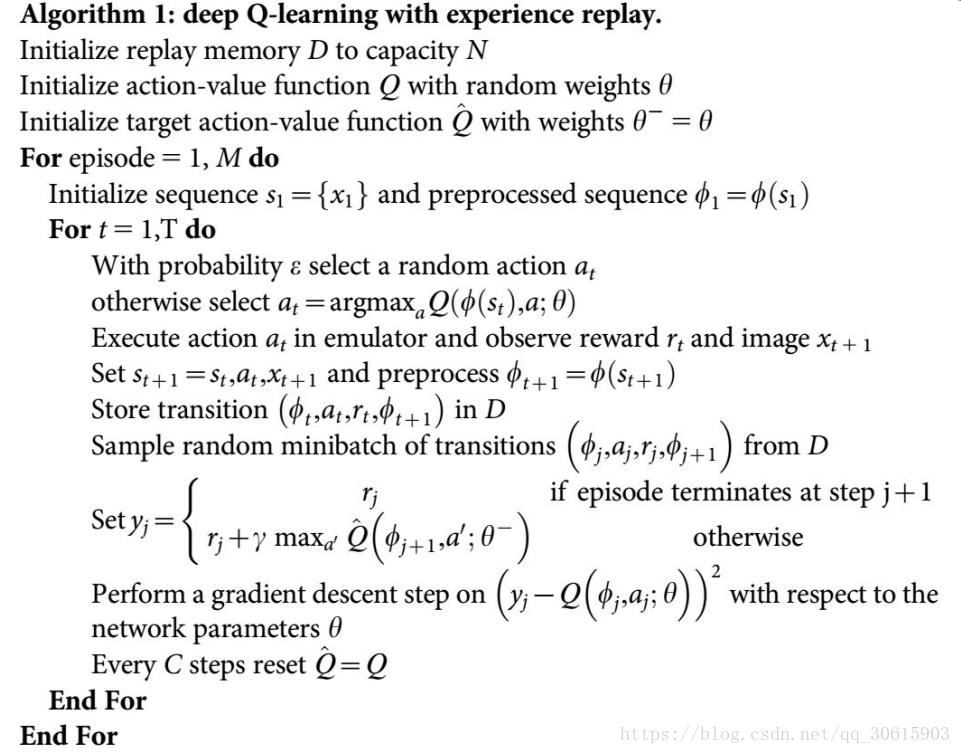
DQN
可以看出,Q-learning的弊端在于要保存所有状态所有动作的效用值,但对于很多问题状态空间太大了,所以就有人引出了DQN算法,改进的地方是使用神经网络来拟合这张表。
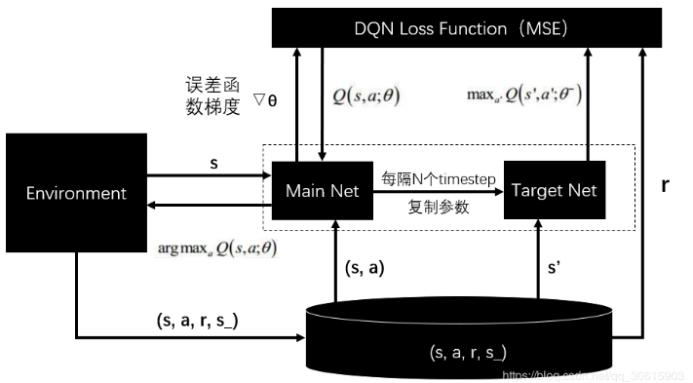
s是状态,a是采取的动作,theta是网络的参数,r是reward。
(s,a,r,s_)是经验池,经验池保存了每个时间步得到的(s,a,r,s_)样本,因为要采用离线的学习方式,随机的从以前的状态中学习(可能是为了防止局部最优)。
经验池中包含了:当前状态、采取的行动、带来的奖励(真实的奖励,而不是预测的)、采取行动后的下一个状态。每次模拟,都会往经验池中新增新的样本。
Q是预测到的奖励,那么为了拟合Q表,就是希望预测到的奖励能够等于真实的奖励。网络的输入是状态,输出是不同动作在该状态下对应的Q值
于是有了mse(r-Q),原公式还有改进,加入了折扣因子gamma,用来同时兼顾记忆中的利益,gamma越大,则原先经验的影响越大。
要理一下,假设有3个动作,那么网络的输出有3个神经元,但是计算loss的时候并没有用到3个神经元,而是选取a_j对应的神经元的值,对应的label是:经验池中面对当前状态,采取a_j后的真实收益 与 采取a_j动作后到达的下一个状态的预测可能最大收益的加权综合, 是在表明,到达新位置后,新位置能够给出的最大效用值,也就是以往的经验。Gamma越大越注重经验,越小,越注重眼前的利益,也就是r。
是在表明,到达新位置后,新位置能够给出的最大效用值,也就是以往的经验。Gamma越大越注重经验,越小,越注重眼前的利益,也就是r。
关于GYM
env.unwrapped.get_action_meanings()可以获取动作的含义。