b+树
B+树简介
结构如图:
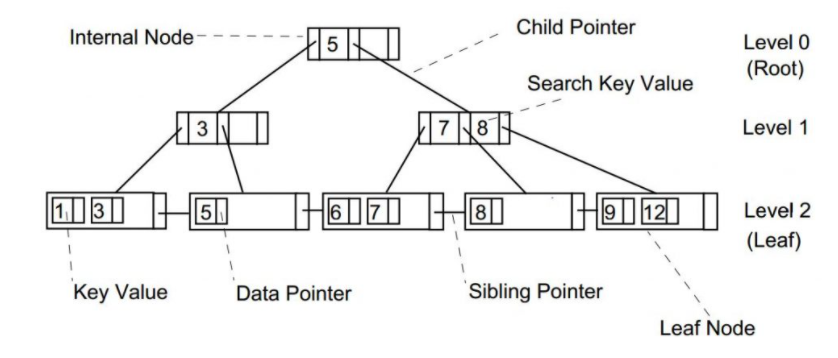
分为两种类型的节点:内部节点和叶子节点
内部节点中包含key和指向孩子节点的指针,指针数 = key个数+1
叶子节点中包含key和指向数据的指针,指针数 = key个数
节点中的key是有序存放的
根节点至少有一个key,指向两个孩子节点
其他节点至少半满,阶数就是最大孩子节点的个数,key_num>=ceil((order-1)/2)
相邻叶子节点间有指针连接,便于区间查询
B+树是向上生长的,就是插入节点后,之后叶子节点拆分后,才开始向上拆分节点,直到根。
插入
1 | 找到要插入的节点 |
删除
1 | //有相应的key的情况 |
序列化反序列化
内存中的B+树如何保存到磁盘,指针维护的父子节点关系如何转化?
用文件偏移量代替指针。数据库实现中,B+树存储在一个文件中,访问孩子节点也是通过文件偏移量实现。
序列化实现
序列化节点,写入前,先保存当前文件偏移量,这是的偏移量就是这个节点的偏移量,用做返回值。
然后正常写入节点的信息如键值数,键值。
如果当前节点有孩子节点,空出一块区域,大小根据孩子个数计算。这块区域等序列化孩子节点完成后,用孩子节点的偏移量填充。回去填充前需要记录当前偏移量,填充完成后再恢复回去,这样文件才能接着往下写。
该过程就是深搜的过程,往下搜的时候写node本身的数据,偏移量先空出来,递归返回后把偏移量填上。
1 | long BPTree::serializeNode(Node * cur_node,int fd){ |
反序列化
反序列化就是根据序列化时的文件格式,找到孩子节点在文件中存储的位置,实例化到内存。
1 | Node *BPTree::deserializeNode(int fd,Node *parent_Node){ |
B+树并发控制机制
https://zhuanlan.zhihu.com/p/50112182
https://zhenghe.gitbook.io/open-courses/cmu-15-445-645-database-systems/relational-data-model
https://www.cs.usfca.edu/~galles/visualization/BPlusTree.html
Redis是一个单线程引擎
VoltDB是多线程引擎
并发协议,强制所有访问数据结构的线程使用这种协议,关注逻辑正确和物理正确
lock和latches
lock是高级层面的概念,保护了数据库中的逻辑内容(tuple,table)
latch是低级层面的概念,关心的是保护数据结构或对象的物理完整性,保护数据库中的关键部分,保护内部数据结构免受其他线程同一时刻读写所带来的问题。
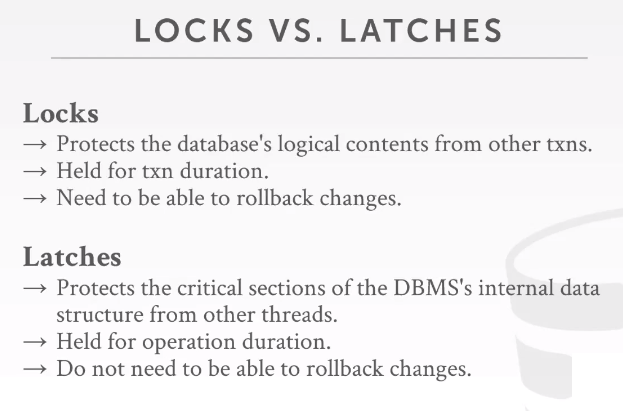
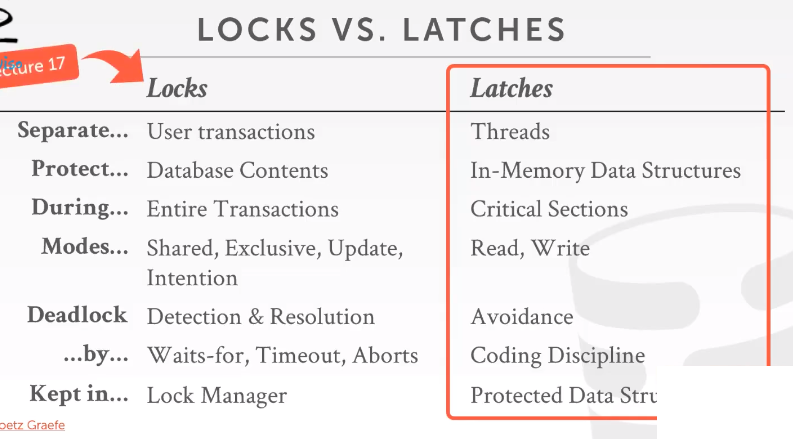
latch只有两种模式,读、写
读模式允许多条线程在同一时间读取同一个对象。
写模式是独占的,只有一个进程能操作对象。
实现方式:
std:mutex m; m.lock(); m.unlock();- linux是用futex实现的,futex指fast userspace mutex,是在userspace也就是进程的地址空间里占用一点内存地址,通过这个内存来尝试进行一次cas操作,来获取这个latch,如果没有获取到,就会退一步使用速度更慢的mutex。(mutex是OS层面的)
- 自旋锁 spin latch,这种做法很快,因为现代CPU里,有一条指令,这条指令可以在一个内存地址上进行CAS操作,c++ 中有std::atomic
可以实现,也有atomic_flag 实际就是atomic 。
b+树的并发协议
两个问题:
- 多个进程试图修改一个节点的内容
- 一个进程在遍历树,而另一个进程在分割或合并节点。
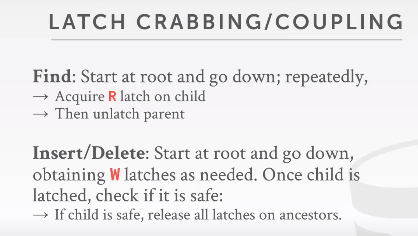
basic idea:
给parent加latch
给child加latch
如果parent是安全的,则释放latch
安全节点:在更新的时候不会分裂或者合并
- 插入的时候不满
- 删除的时候大于half-full
a better latching algorithm
- Insert/Delete:
- 使用与 Search 相同的方式在查询路径上获取、释放read latch,在 leaf node 上获取 write latch
- 如果 leaf node 不安全,可能会引起其它节点的变动,则使用 Latch Crabbing 的策略再执行一遍
该方法乐观地假设整个操作只会引起 leaf node 的变化,若假设错误,则使用 Latch Crabbing 的原始方案。
Horizontal Scan
之后再看