leveldb是LSM(Log Structured-Merge Tree)树的经典实现,除去测试部分,代码量大概1.5W行,遵循google c++代码规范。
调试环境搭建
1 | 先git clone |
LSM-tree
设计LSM tree的目的是为了实现高效写入操作。
为什么要提出LSM-Tree,因为原有的B+树的写操作太慢了,根本原因是磁盘的随机操作满,顺序读写快。
以此磁盘I/O的时间 = 寻道时间 + 旋转时间 + 数据传输时间
其中寻道是磁头移动到正确的磁道,旋转是讲扇区移动到磁头下,这两个都是机械操作,磁头寻址耗时造成随机操作耗时。
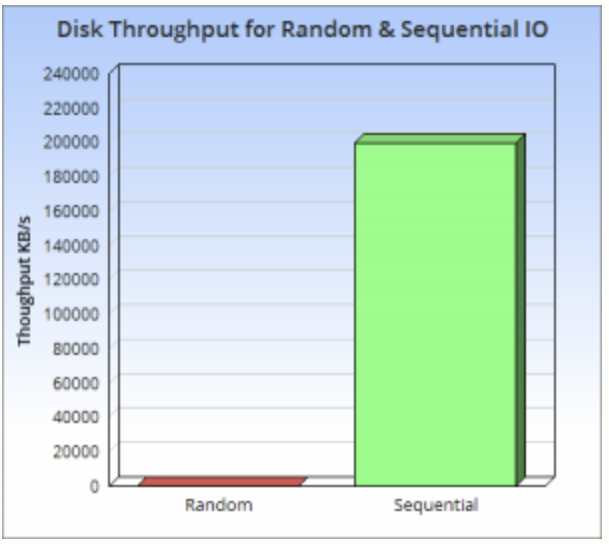
磁盘的顺序读写要远快于随机读写,而且快了三个数量级。
LSM-tree 的通用结构
LSMtree由内存驻留组件和磁盘驻留组件组成。
整体设计
memtable
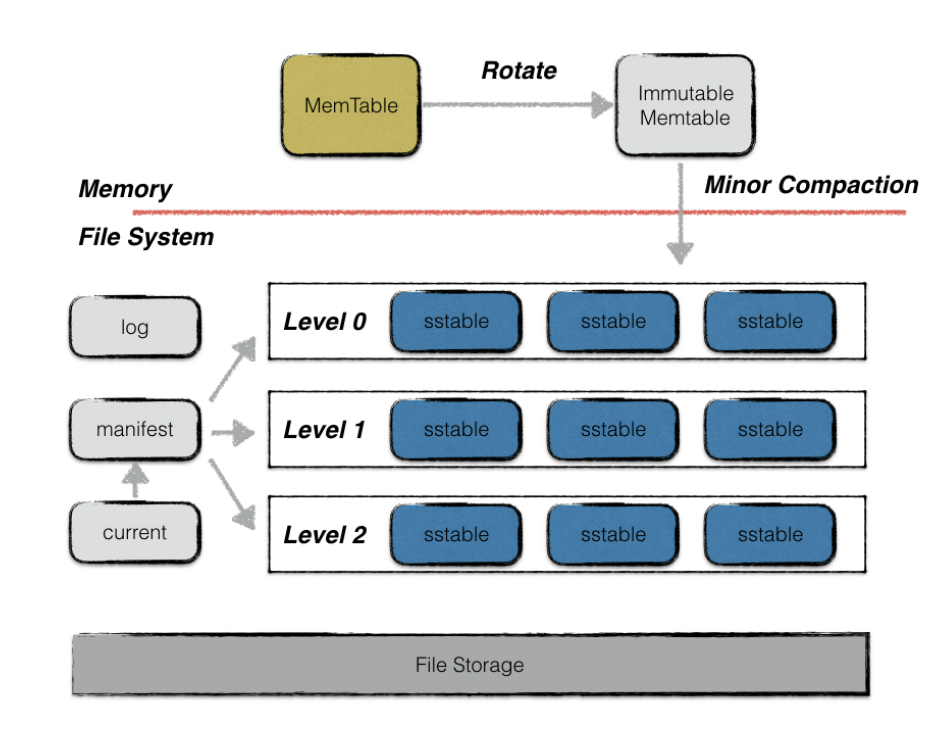
一次leveldb的写入过程并不是直接将数据持久化到磁盘文件中,而是先写将操作写到日志文件中,然后将写操作应用到memtable。
memtable是在内存中维护的一个跳表的数据结构。系统运行过程中,如果memtable中的数据占用达到指定值(write buffer size),memtabe 会转化为immutabel,然后自动生成新的memtable。immutable 被新的线程dump到磁盘中,dump结束后immutable就可以被释放了。
1 | class MemTable {//是一个接口类,核心的数据结构是里面的skipList,定义在memtable.h里 |
跳表中KV的存储格式为:
1 | | Internal Key size | internal key | value len |value| |
跳表的排序基于:
- 首先根据user key按升序排列
- 然后根据sequence number按降序排列
- 最后根据value type按降序排列
跳表
一种支持二分查找的有序链表
就是在原始的链表上加了多级索引
SStable
数据最终在磁盘上的物理存储,sorted string table.
一个sstable就是一个文件,作者在doc/table_format.md描述了文件的逻辑结构
1 | <beginning_of_file> |
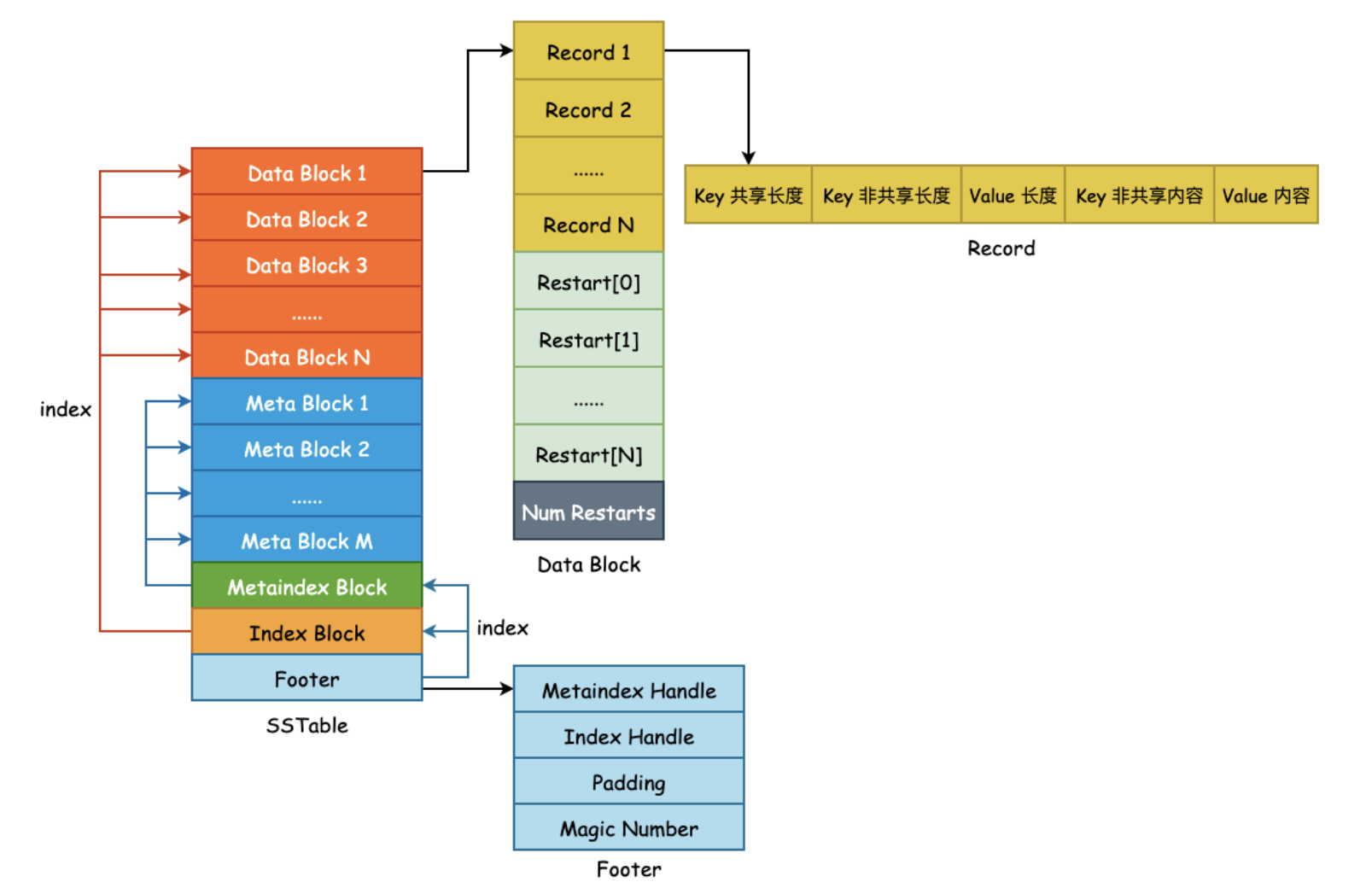
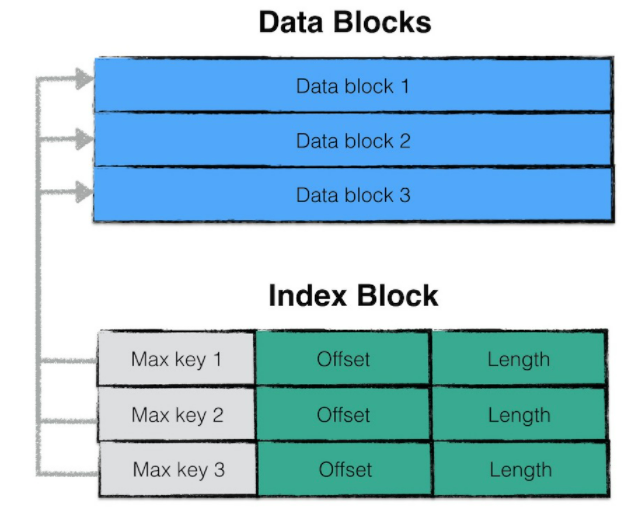
- Data Block:存储KV对,有序
- Meta Block:每一个DataBlock对应一个Meta Block,存储的是布隆过滤器,可以快速定位key是否在data block中
- Meta Index Block:对meta block的索引,<过滤器名字,offset,size>
- Index Block:是对Data Block的索引,<该块最大key值,该块在sstabl中的偏移量,块大小>
- Footer:可以理解成文件头
查找key步骤
- 找文件:找到可能包含key的sstable
- 加载IB和FB:把sstable中的index block和filter block加载到内存
- 查找IB:二分查找index block找到可能包含key的data block
- 查找FB:通过过滤器判断key是否在data block中
- 加载DB:如果过滤器判断在,则加载data block
- 查找DB:二分查找data block
- 读数据
- 如果fliter判断不存在或者查找不存在,则在下一个搜索候选文件。
Block 存储格式
块是sstable的组成单位,一个块约4kb大小,块大不是定长而是一个阈值,为了。
Block有三部分组成:block data, type, crc32,默认每个块大小为4kb。 其中type是压缩方式:none或则snappy。

1 | class BlockHandle { |
布隆过滤器
布隆过滤器是未来在大量数据中查询某个字符串是否存在
比如:
- word如何判断某个单词是否拼写正确
- 网络爬虫中如何不去爬相同的页面
定义
布隆过滤器是一种概率型的数据结构,特点是高效的插入和查询,能返回某个字符串一定不存在或者可能存在,相比传统的数据结构,如hash表,set,map更加高效,占用的空间更小,代价是返回的结果是概率存在,同时不支持删除操作。
组成
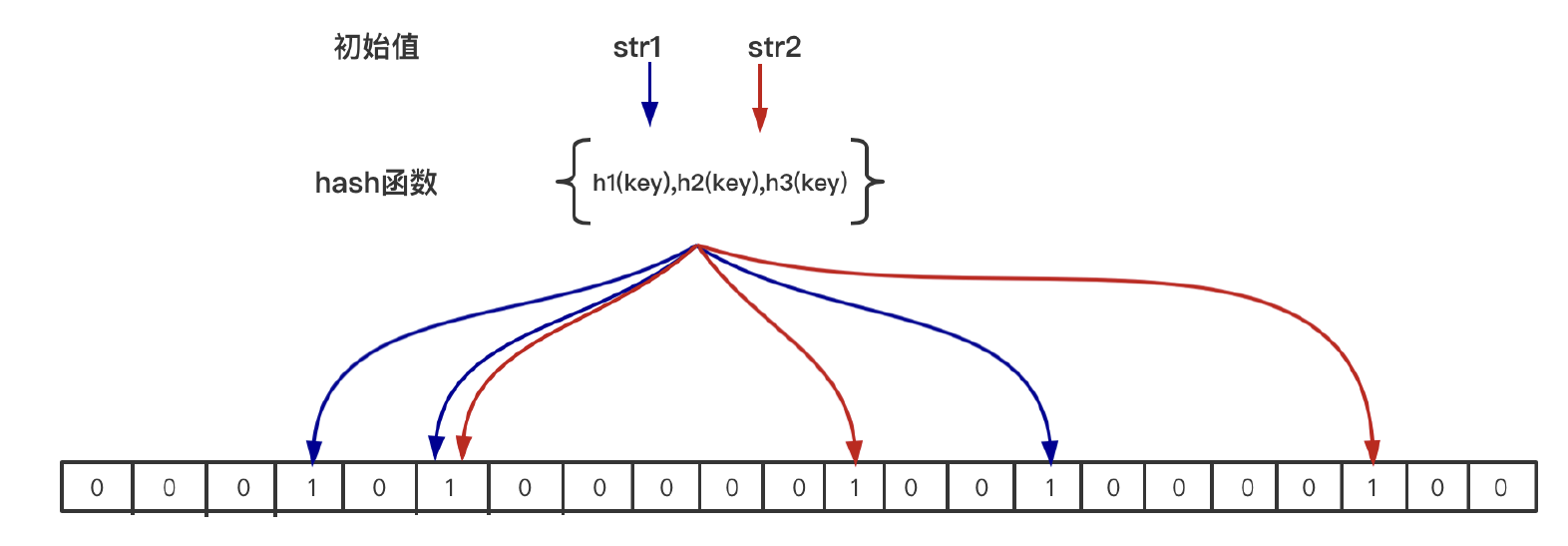
- bitmap + n个hash函数
原理
- 添加:利用n个hash函数将这个元素映射到位图里的n个点,置为1
- 查找:用n个hash函数检测位图中的k个点是否都为1,如果有不为1的点,就认为不存在,全部为1,则可能存在(hash冲突)
SSTable的合并
合并分两类:minor compaction和major compaction
minjor compaction
immutable memtable持久化成sstable的过程,优先级高,完成内存数据的持久化
注意到level 0层的sstable文件数据是可能存在overlap的,所以需要往下合并,去重,提高查找效率。
major compaction
触发条件
- 0层文件超过上限(4个)
- level i层文件总大小超过(10^i)MB
- 某个文件无效读取次数过多
合并流程
- 寻找第一个输入文件:不同触发条件的输入文件不同
- 根据key的重叠情况扩大输入文件集合
- 多路合并:i和i+1层文件中的数据项合并,冗余数据清理,保留最新数据,输出到i+1层
缓存系统
缓存的是sstable中的文件对象和相关元数据,如果以此读操作都会发生一次磁盘IO,那么整体效率会非常低下,所以需要把热数据加入cache。
TableCache
查找数据时,现在memtable和immutable 中查找,如果都查找不到,那么就要打开sst文件,解析文件中的index block,然后根据index block 找到对应的data block中进行查找,如果对于每次sst查询都经历上述步骤,效率很低。因此引入了table cache来缓存sst文件和对应的index block。
table cache创建
/db_impl.cc文件中的的DB构造函数中创建了table_cache_
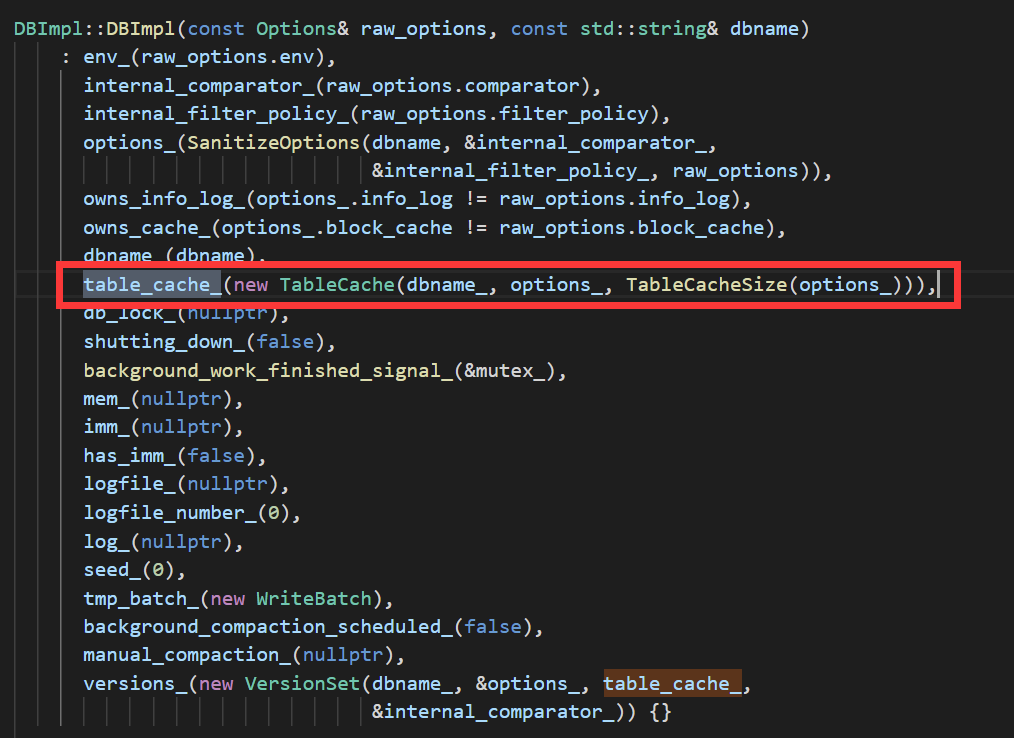
table_cache_是TableCache的一个实例化对象,然后跳转到TableCache的构造函数里看:
1 | TableCache::TableCache(const std::string& dbname, const Options& options, |
发现TableCache的成员对象cache_是由NewLRUCache函数初始化的,再跳转到NewLRUCache:
1 | Cache* NewLRUCache(size_t capacity) { return new ShardedLRUCache(capacity); } |
发现cache_实际是ShardedLRUCache对象的一个实例。
ShardedLRUCache
1 | class ShardedLRUCache : public Cache { |
可以看出ShardedLRUCache里面维护了一个LRUCache数组。
这样设计的目的是为了减少多线程访问加锁时的竞争,查找key的时候,先计算属于哪一个LRUCache,然后只对一个LRUCache进行加锁,而不是整个cache一把锁。分区是一个减少竞争的策略,比如ptmalloc在管理堆内存的时候也引入了arena分配区的概念,malloc和free时先查找要在哪个分配区上进行操作,只对一个分配区加锁。都是为了减少竞争。
所以看LRUCache的实现就可以了。
LRUCache
在跳转到LRUCache:
1 | class LRUCache { |
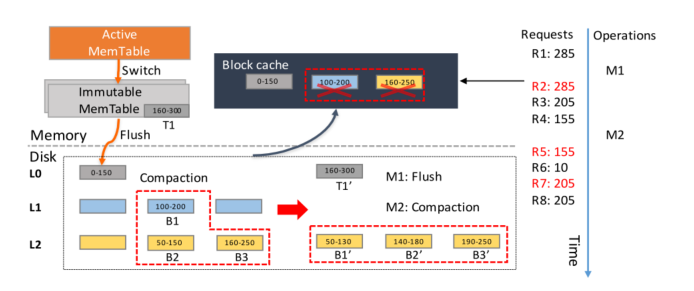
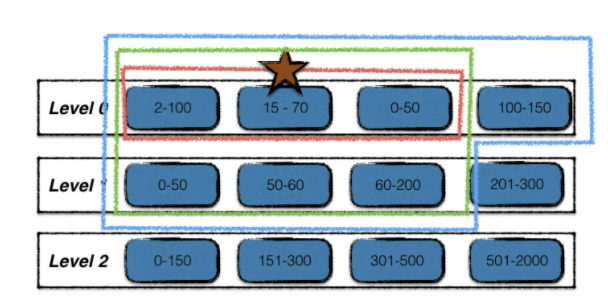
缓存失效问题
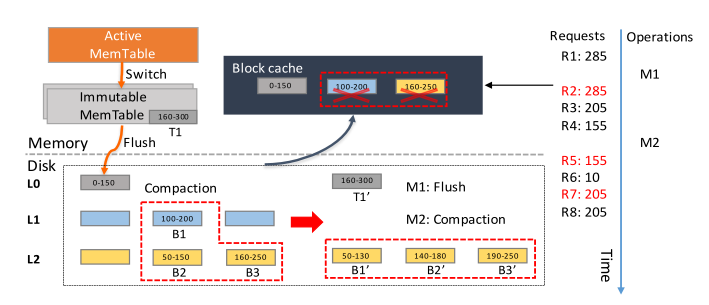
开始时,M1将immutable memtable刷盘,R2请求285,失效。M2产生了compaction,L1的一个块和L2的两个块合并,新产生的块放在L3,这时R5访问155,155所在的块已经被修改,cache失效,R7访问205,同样失效。
版本控制
什么时候产生新的版本
sstable的更替对leveldb来说是一个最小的操作单元,具有原子性,leveldb每次生成或者删除sstable,就会产生新的版本。
代码分析
Get
status = db->Get(leveldb::ReadOptions(),key, &value);
1 | Status DBImpl::Get(const ReadOptions& options, const Slice& key, |
列簇
列簇 column families是rocks db中的概念
数据分片,将键值对按照不同的属性分配给不同的CF

问题
- 利用sstable中的index block进行快速的数据项位置定位,得到该数据项有可能存在的两个data block;??为什么两个
- 引用计数和锁
- compaction 为什么能平衡读写