基本特点
Linux是单内核的(也叫宏内核),较少了消息传递的开销(函数调用形式),性能会更好,但是可扩展性就会比较差。为了改善单内核的可维护性,Linux提出了内核模块机制,用户可以在不对内核重新编译的情况下,动态向内核装入和移除模块。
微内核和宏内核的根本区别是,微内核是进程间通信,宏内核走函数调用。
模块的本质是一种目标对象文件,不能独立运行,但是其代码可以在运行时连接到系统中作为内核的一部分运行,从而动态扩展内核的功能。
对比应用程序和内核模块
| C语言应用程序 | 内核模块程序 | |
|---|---|---|
| 使用函数 | Libc库 | 内核函数 |
| 运行空间 | 用户空间 | 内核空间 |
| 运行权限 | 普通用户 | 超级用户 |
| 入口函数 | main() | module_init() |
| 出口函数 | exit() | module_exit() |
| 编译 | Gcc –c | Makefile |
| 连接 | Gcc | insmod |
| 运行 | 直接运行 | insmod |
| 调试 | Gdb | kdbug, kdb,kgdb等 |
内核开发中没有libc,标准头文件。考虑大小,内核页禁止患处,常驻内存,不能太大。
应使用GNU C,不完全符合ANSI C标准
关注的语法特性
- inline c99标准引用
- 内联汇编:asm volatile(……)
- 分支优化预测,likely、unlikely给编译器提示,这是kernel代码中定义的宏,c++20才作为关键字
没有内存保护机制
不要轻易在内核中使用浮点数
- 内核态进程使用浮点操作时,内核会完成从整数模式到浮点操作模式转换
- 通常时通过捕获陷阱进行转换
- 内核态进程使用浮点操作时,内核会完成从整数模式到浮点操作模式转换
内核本身不能陷入,需要人工保存、恢复浮点寄存器。
函数调用栈很小,所以别用局部大数组
默认情况下,64位栈大小为8kb
不要使用局部数组、不要使用递归调用
非要递归,写尾递归
尾递归
f(int n) { if(n==1) return 1; return n*f(n-1); } 改写 f(int res, int n) { if(n==0) return res; return f(res*n,n-1); }//编译器会自动展开成循环 <!--code0-->
1 | (gdb) disass func1 |
内核模块机制:
首先需要了解内核符号表的概念,内核符号表存放了所有模块可以访问的符号及相应的地址,模块声明的任何全局符号都成为内核符号表的一部分。
内核符号表处于内核代码段的_ksymtab部分,其开始地址和结束地址是由C编译器所产生的两个符号来指定:__start_ksymtab和_stop_ksymtab。
内核模块没有main函数,通过回调方式运行
回调:向内核注册函数,然后应用程序触发函数的执行,比如驱动程序在初始化时,向内核注册处理某个设备写操作的函数,当应用程序使用write系统调用写该设备时,内核就会调用注册的回调函数。
内核模块makefile编写
1 | ifneq ($(KERNELRELEASE),) |
优化和调试级别
优化
- -O0 优化级别,没有优化
- -O1 基本优化级别
- -O2 主要优化时间效率,不考虑生成的目标文件大小
- -O3 最高优化级别,一般不用
- -Os 优化生成的目标文件大小,并且激活-O2中不增加代码大小的优化选项
- -Og gcc4.8中引入的优化级别。编译快,同时合理提供运行效率。
调试级别
- -g 利用操作系统native format生成调试信息,调试器可以直接使用,默认是-g2
- -g2 包含扩展的符号表,行号,局部或外部变量信息
- -g3包含2中的所有调试信息,外加源码中定义的宏
- -ggdb 是gcc为gdb专门生成的调试信息,只能用gdb调,默认是-ggdb2
- -ggdbx,x跟在-gx的解释一样
- -g0其实是不包含调试信息,等于不使用-g
- -g1不包含局部变量和行号有关的调试信息,因此只能用于回溯跟踪(函数调用历史)和堆栈转储
内核源码各目录功能
du -sh 源码大概800mb
arch是体系结构相关的代码
arm/boot是启动相关的代码
mach-xxx开头是不同公司针对硬件平台增加的代码,比如三星的飞思卡尔的,不同的硬件平台配置不同。
/Documentaion 是内核说明
/firmware 固件芯片相关
/init 内核初始化代码,汇编代码会调用start_kernel函数,do_mount挂载文件系统
/usr是测试代码,不用看了
/block 块设备相关代码
/drivers 是驱动代码,占据了内核代码的一半以上。
/fs文件系统代码
/ipc 进程通信相关代码
/kernel 内核核心通用代码,比如进程
/arch/arm/kernel 是体系结构相关的内核代码,kernel里的代码会调用这里面的
/net 网络子系统相关代码
/crypto 加密相关
/sound 声卡相关
/include 内核头文件相关
/lib 通用库,给内核各个模块使用
/mm 内存管理,页表页表管理等等
/scripts 编译内核的脚本
编译内核
顶根目录下有一个makefile文件,各个子目录下也有makefile文件。
顶层makefile通过include子目录下的makefile文件。
顶层makefile首先会include体系结构相关的makefile文件
1 | SRCARCH := $(ARCH) |
子目录,顶层makefile会调用这些子目录的makefie:
1 | init-y := init/ |
比如drivers/tty里的,Kconfig文件是make menuconfigkey看见的配置文件,makefile里面就是那些文件应该编译成ko或者哪些不需要编译。
里面都是obj打头的变量。-y表示编译到内核里,-m表示编译成驱动的形式
1 | ``` |
export KBUILD_LDS := arch/$(SRCARCH)/kernel/vmlinux.lds
1 |
|
KBUILD_CFLAGS += -I/root/kernel-ml/include这样可以添加头文件
为了方便,下载与当前系统相同的内核版本进行修改,这样编译不容易出错。然后用当前系统的config文件基础上进行。编译内核的时候为了方便调试尽量不要优化。-02改成-O1。-O0会编不过
1 | cp /boot/config-xxxx-generic /pwd/.config |
编译成功后的效果:
安装了linux-headers文件
ls /usr/src/ 里面会有对应版本的headers文件夹 里面存放了用来编译内核模块的内核makefile,包括顶层makefile,用来编译内核模块 include里面就是头文件1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
* `/lib/modules`新增了对应版本的文件夹,里边的build、source指向了刚刚编译内核的目录
* `/boot`目录下增加了config-xxxx,inintrd.img,符号表信息System.map-xxx,内核映像vmlinuz-xx(理解成内核的可执行文件)
* 启动项里也有增加,`vi /boot/grub/grub.cfg`
什么是initrd
系统启动的过程中,一个重要的任务就是mount根文件系统,里面存放了大部分系统程序
而要mount根文件系统,必须有磁盘的驱动程序和文件系统驱动程序
由于硬件和兼容性的限制。内核影响的大小不能太大
Linux需要尽可能的支持多的硬件设备,但是由于内核映像大小的的限制,不能随便把硬件设备驱动程序放入内核映像中。
于是将各种硬件设备、文件系统的驱动程序模块化。发行商提供内核映像、系统安装程序,系统安装过程中,会跟根据当前硬件设备情况,选出系统启动需要的驱动程序,并据此制作成initrd
initrd相当于一个临时的根文件系统,其中存放了系统启动必须的各种驱动程序
### 修改grub启动项
```shell
grep menuentry /boot/grub/grub.cfg
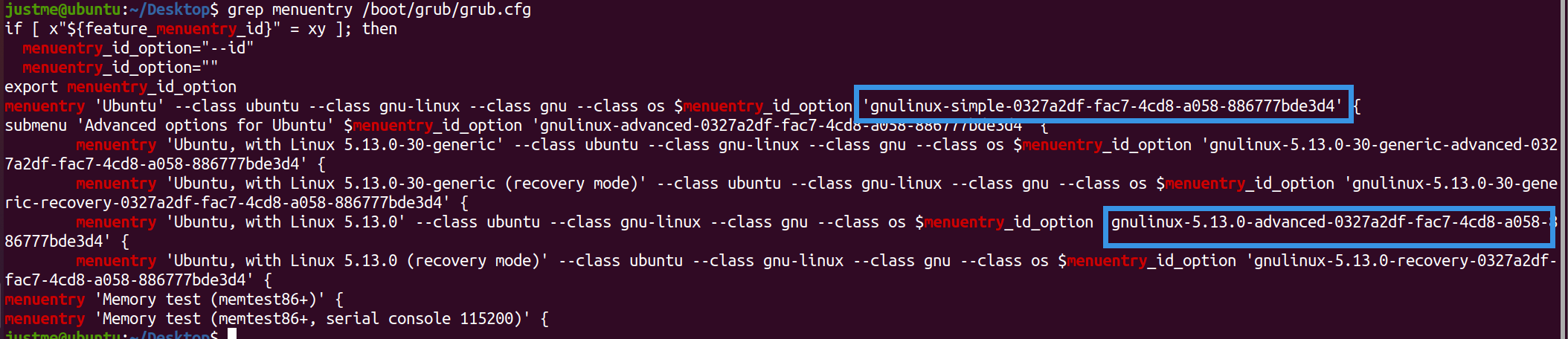
1 | vim /etc/default/grub |

修改GRUB_DEFAULT,submenu之间用>连接
kgdb
原理
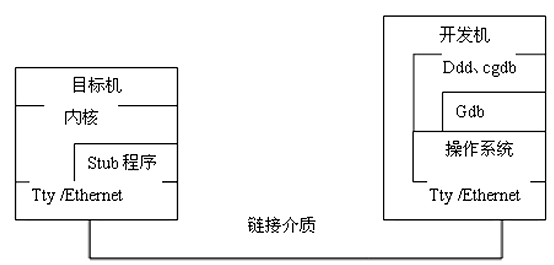
- 一台目标机,target、服务器,运行kgdb,需要调试时。目标机启动kgdb,控制权就移交给kgdb。等待连接gdb连接
- 一台开发机,host,客户端,运行gdb,调试命令发送给目标机。使用gdb连接目标机的kgdb。发起连接
调试器基本原理
断点如何实现
设置断点,调试器会将断点处的内存修改为0xcc,也就是int3
运行到断点,相当于执行int3的处理函数,就是调试器的主要工作环境
然后调试器再把断点处的0xcc修改为原值
环境搭建
step1:编译内核
- 尽量不要优化编译,去优化。makefile文件里的-O2改成-O1。
- 不要设置优化大小CONFIG-CC_OPTIMIZE_FOR_SIZE
- 设置CONFIG_DEBUG_SECTION_MISMATCH,相当于-fno-inline-functions-called-once,避免inline优化
step2:利用VMWare clone虚拟机
step3:为两个系统配置串口
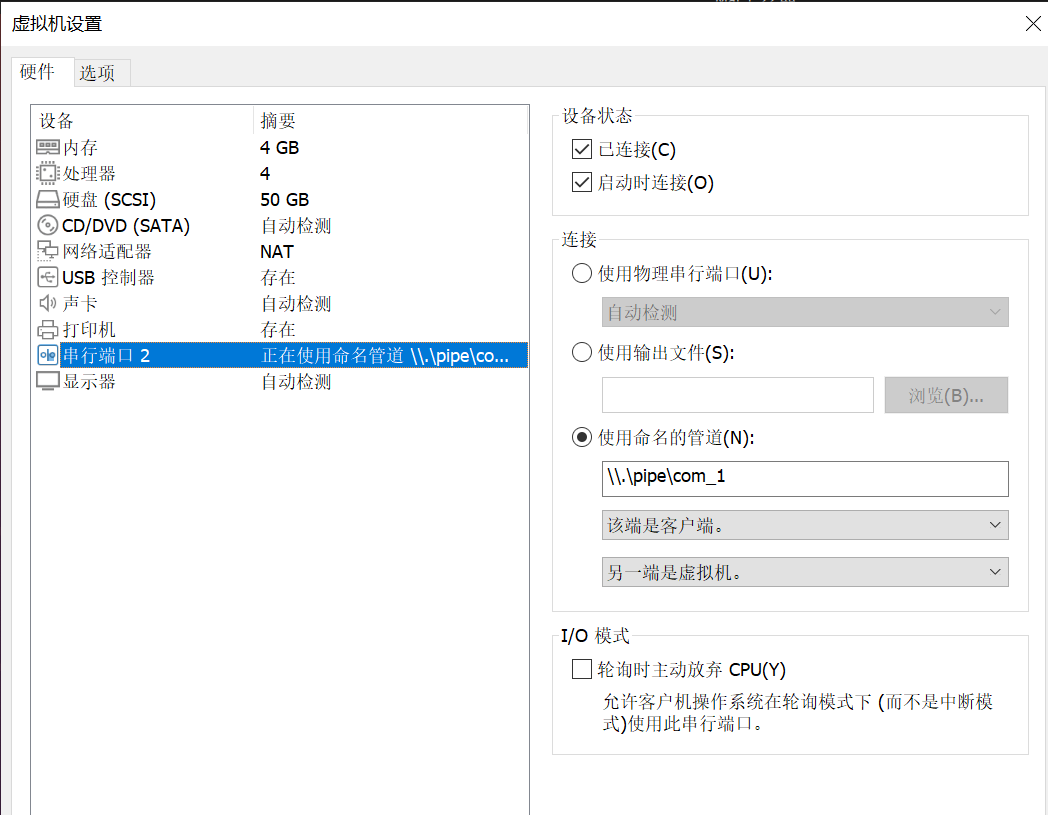
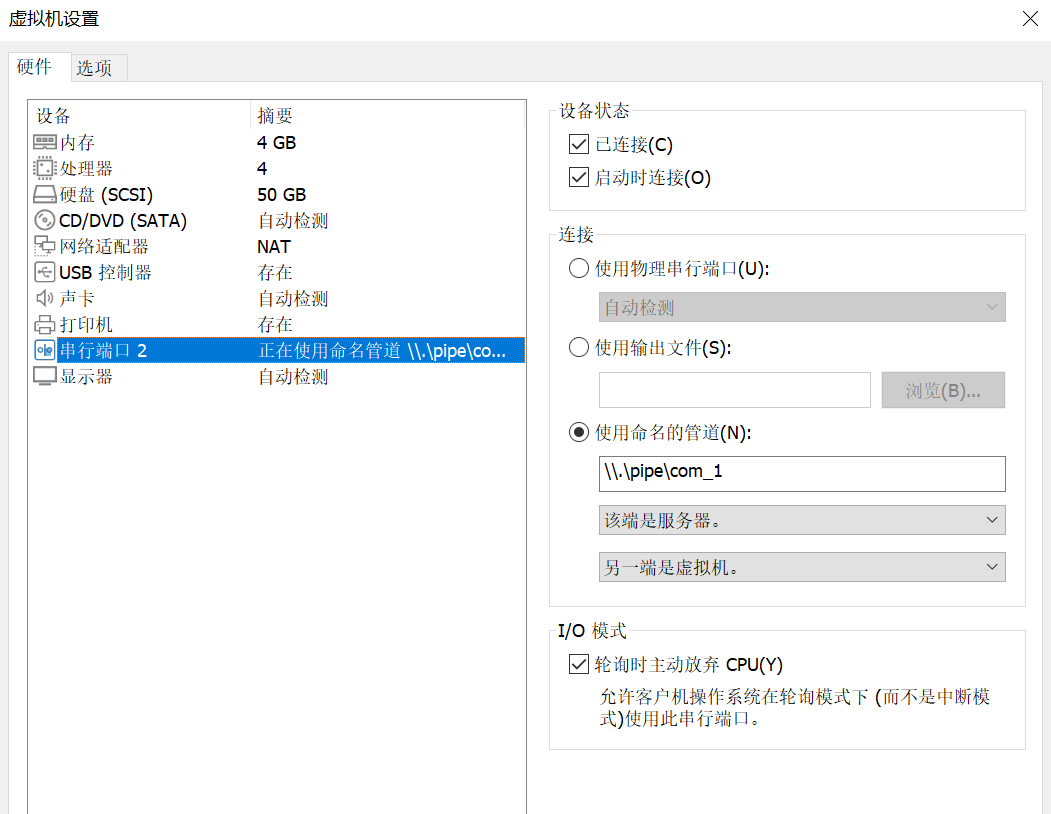
- 目标机:
cat /dev/ttyS1 - 开发机:
echo "test" > /dev/ttyS1
step4:配置grub.cfg,禁止内核地址随机化(nokaslr),不要直接改.cfg
- 修改/etc/default/grub文件,增加:GRUB_CMDLINE_LINUX=”nokaslr rootdelay=90quiet splash text kgdboc=ttyS1,115200”
- 坑:增加后实验2.4会死机?,不知道为什么
- 执行#update-grub
- 修改/etc/default/grub文件,增加:GRUB_CMDLINE_LINUX=”nokaslr rootdelay=90quiet splash text kgdboc=ttyS1,115200”
内核源码调试
目标机:echo g > /proc/sysrq-trigger
开发机:
1 | gdb ./vmlinux |
找出代码段、数据段、bss段地址:
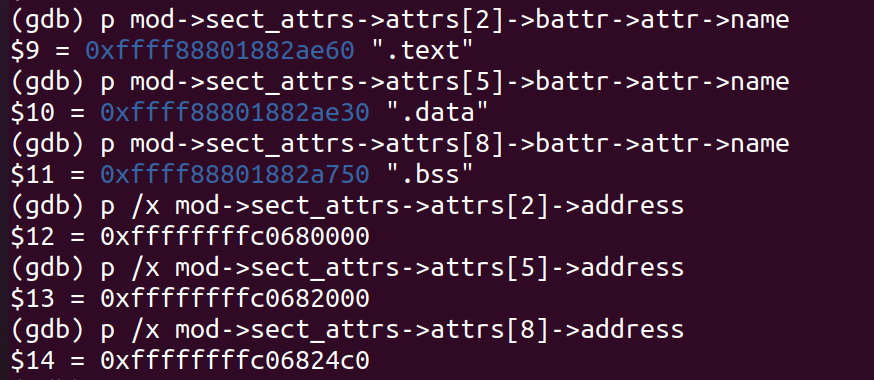
然后设置各段地址:
add-symbol-file /mnt/hgfs/lilin-linux/homework/1/driver/AddModule.ko 0xffffffffc0680000 -s .data 0xffffffffc0682000 -s .bss 0xffffffffc06824c0
然后就可以对模块进行打断点调试等等。
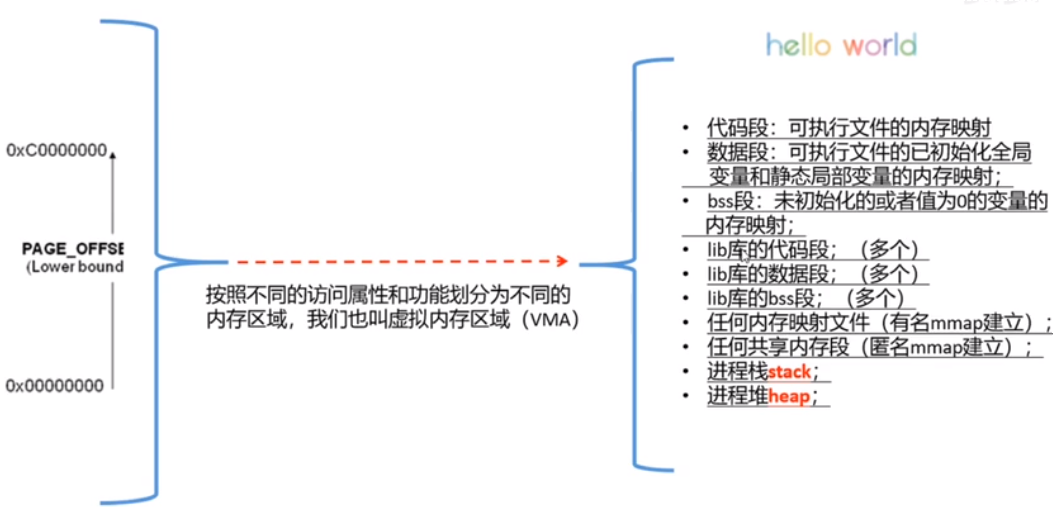
进程的用户栈和内核栈
用户栈:
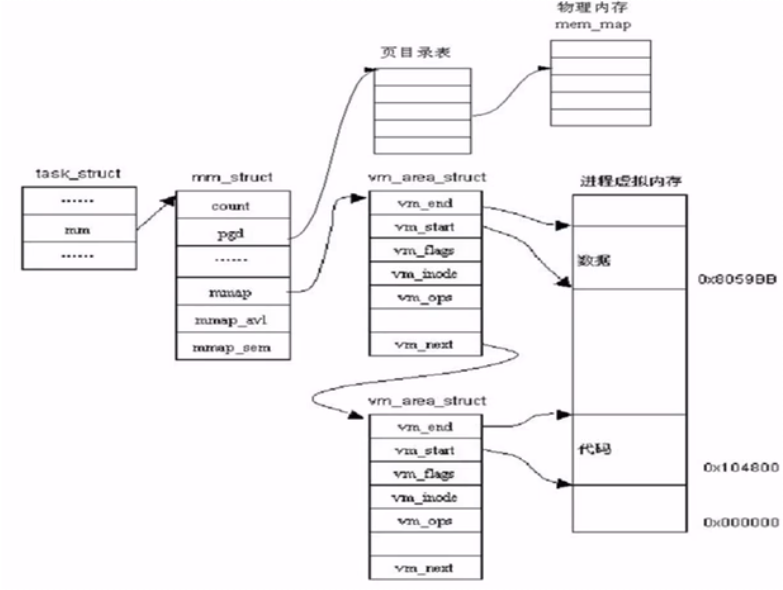
基于进程的虚拟地址空间的管理机制实,以VMA的形式实现
内核栈:
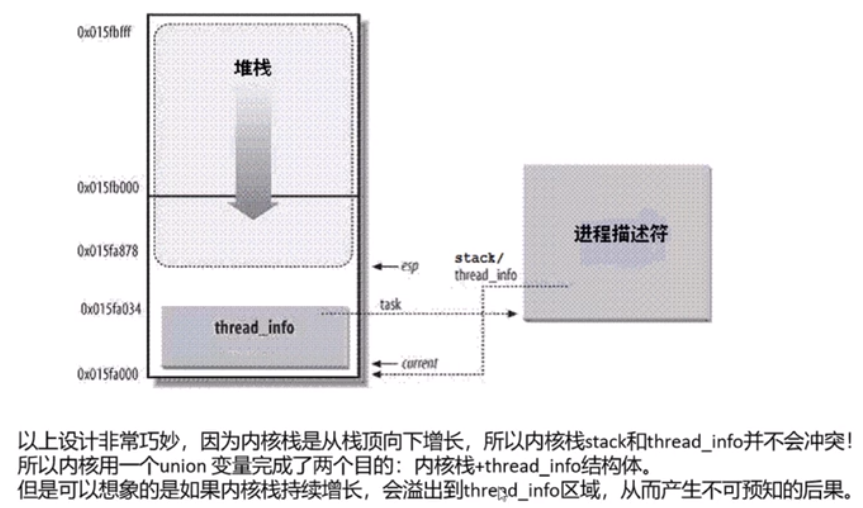
每个进程都有自己的内核栈,一般是4k,一个page。作为task_struct的一部分。每个进程可能通过系统调用进入内核,内核会代表进程执行一些代码,会保存一些私有的数据,这时候就要用内核站。
task_struct描述了linux进程的通用部分
里面的一个结构体thread_info 描述了特定体系结构的汇编代码段需要访问的那部分进程的数据。定义在arch/arm/include/asm/thread_info.h
是不同体系下进程的描述。
内核同步场景
源码相关
GDT表管理代码
管理GDTR必须要专门的指令,lgdt和sgdt
内核一定会使用lgdt指令把GDT表的及地址写入GDTR寄存器
所以在源码文件中搜索出现了lgdt指令的地方
方法是利用源码搜索网站结合观察源码一层层找
最后找到内核用gdt_page管理GDT表
1 | struct pv_cpu_ops { |
GDT全局描述符表位于内存中,每个CPU对应一个GDT
__thread和PerCPU
PerCPU
假设有一个per cpu变量int x, x存在于内核映像文件.data..percpu段内。当系统初始化时,内核会为每个cpu都分配per cpu内存空间,并向其中复制一份.data..percpu段内的所有内容。
pvops
pvops接口来源于Xen项目,初衷是建立一个类虚拟化(para-virtualized)内核来适应于不同的hypervisor(虚拟层),当然也包括适应于非虚拟化平台。
pvops将类虚拟化操作分成一系列结构:pv_time_ops,pv_cpu_ops,pv_mmu_ops,pv_lock_ops和pv_irq_ops。
举个例子,x86系统中利用MOV CR3指令来加载页表。pvops将其替换为一个间接跳转到pv_mmu_ops -> write_cr3函数。 每种虚拟化平台,对这些函数都有自己的实现。上面是load_gdt在x86的实现。
https://diting0x.github.io/20170101/pvops/
问题:gdt表是一个cpu一个吗?
page fault两个例子:mmap,fork的写时复制
堆栈地址范围
内核编了,kgdb调
kpti